近日,米兰平台工程科学学院、人形机器人研究院李木军副教授、张世武教授,联合生命科学与医学部胡兵教授,提出了一种新型多孔磁性软体抓手(PMSG),通过在柔性磁性硅胶中融入多孔设计,使得PMSG能够迅速且安全地抓取脆弱的生物活体。成果以“Porous Magnetic Soft Grippers for Fast and Gentle Grasping of Delicate Living Objects”为题发表在国际期刊《先进材料》上。
磁性软体抓手因其操作灵活、反应迅速,并且对生物体安全而备受瞩目。它们特别适合用来精细地处理那些脆弱的生物体。然而,如何在操作过程中不伤害这些生物体,一直是科研人员面临的一个挑战。针对上述挑战,研究团队提出通过将多孔结构引入磁性硅胶弹性体制造PMSG的方法,使其具备高磁化、低模量和粗糙表面特点,从而展现卓越的柔软度和适形性,同时在快速抓取时减少对物体的冲击。这种简单有效的方法为高性能致动器与生物的安全交互提供了全新的思路。
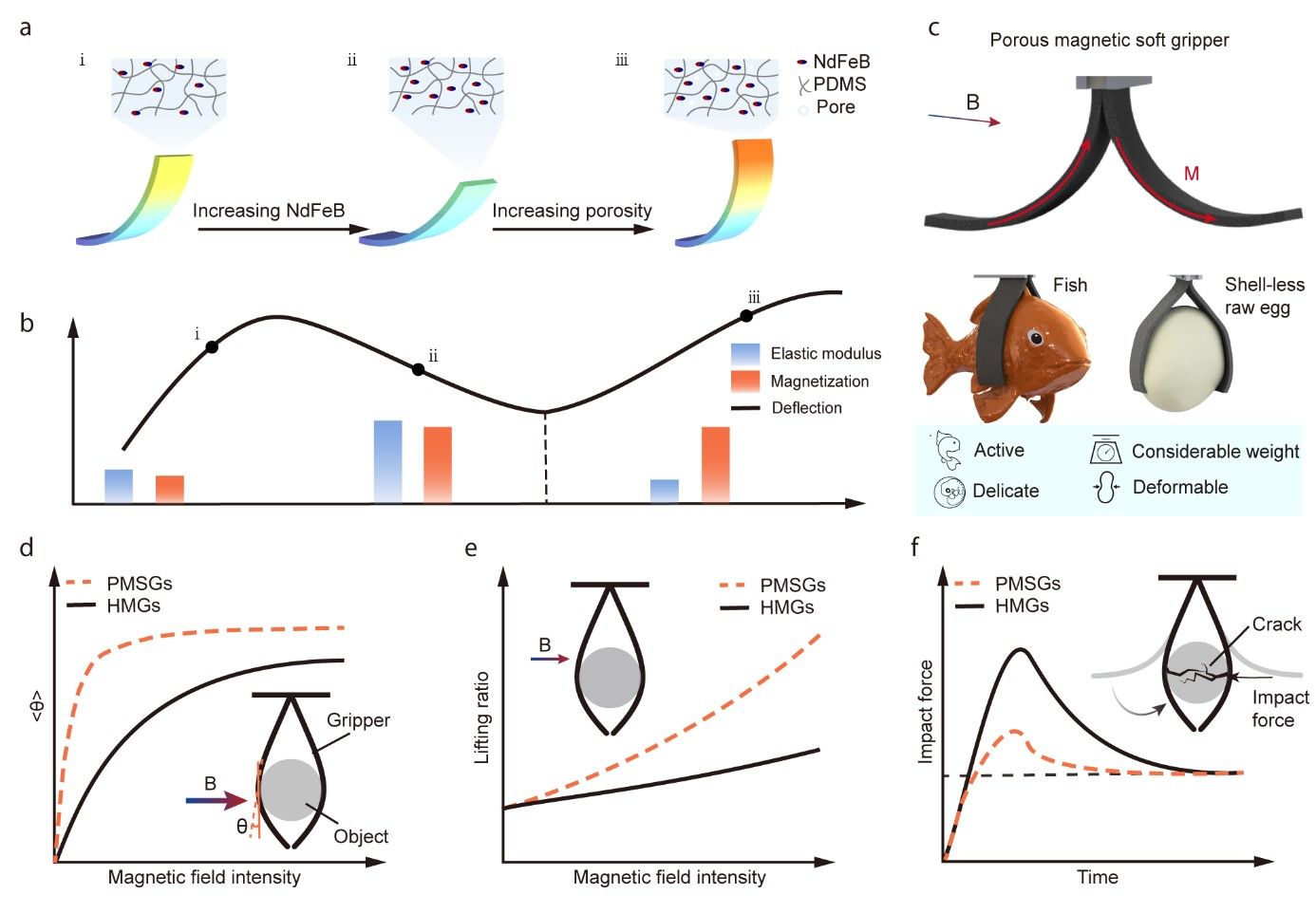
图1.多孔磁软体抓手设计
研究团队提出的多孔磁性软体抓手凭借其多孔结构,展现出卓越的柔软度和适形性,能够轻松抓取各种大小和质地的物体。这种软抓手的灵活性使其能够适应复杂或形状不断变化的物体,提供了比传统机械抓手更可靠的抓取方案,特别是在处理形状不规则或容易变形的物体时更为有效。由于具备高磁化强度和低弹性模量,能够迅速对磁场变化作出反应,同时保持较小的冲击力,确保安全地抓取易碎物品,如能够快速安全抓住上抛的去壳生鹌鹑蛋。此外,多孔磁性软体抓手在生物医学领域,尤其是细胞操作方面,展现出巨大的应用前景,因为它能够提供持续而温和的压力,确保对生物样本的轻柔与安全抓取,为医疗微操作器械的创新提供了新的可能性。
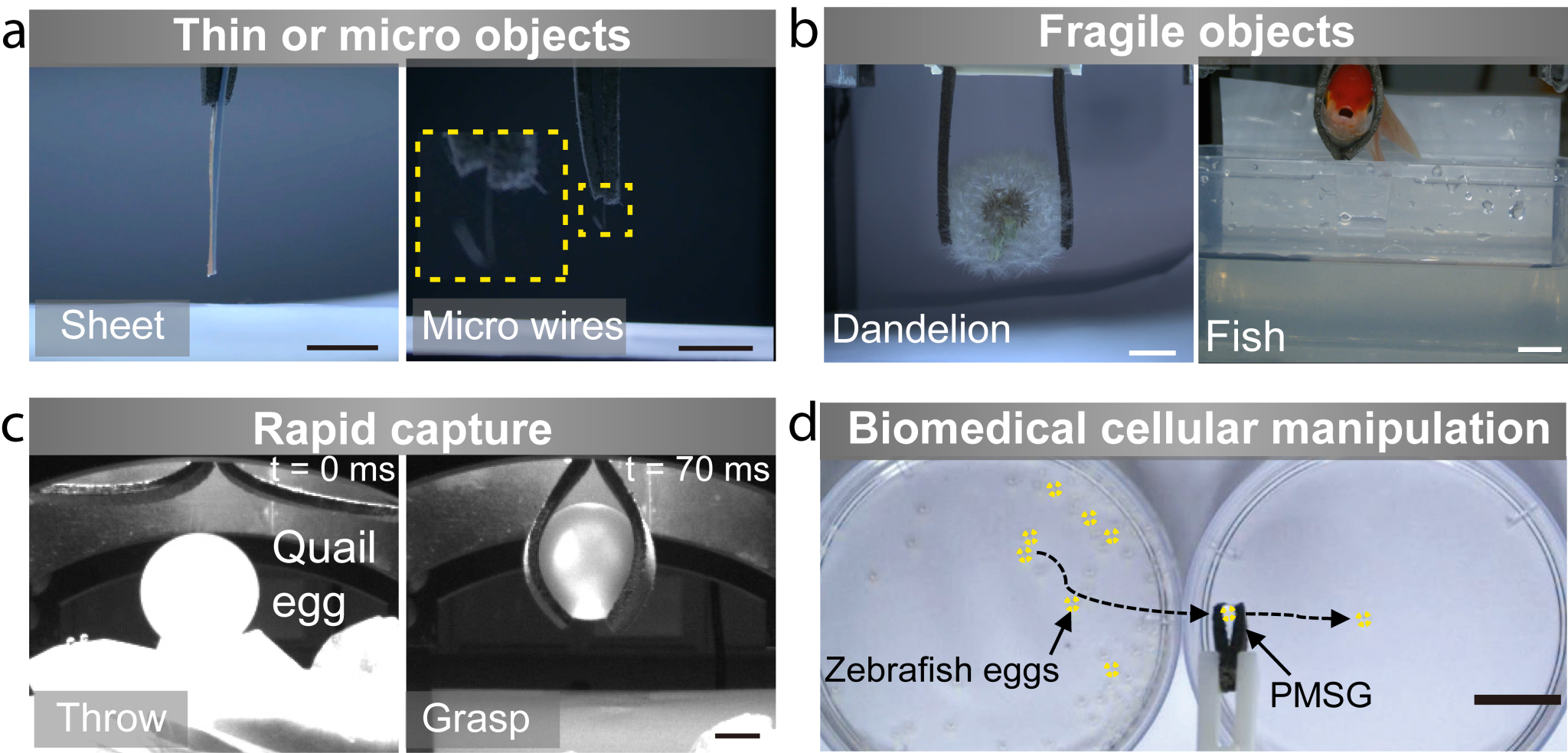
图2.软体抓手的多功能性展示(a)抓取薄板和细线(b)抓取鱼和蒲公英(c)快速抓取去壳生蛋(d)安全移取斑马鱼卵
此外,研究团队还进一步开发了可远程操作的多孔磁性软体抓手,克服了传统磁驱动抓手对大型电磁场线圈的依赖,更有利于与移动平台相结合,从而适用于更广泛的应用场景。所设计的抓手能够与移动机器人集成,实现对小鸡的温和抓取与定点移动。同时,该软体抓手还可与无人机集成,可以捕获水中的小鱼,并能迅速地将它们进行远距离的安全转移。这些结果表明,多孔磁性软体抓手在未来的野外生物样本收集和生物医学研究中将发挥更加重要的作用。
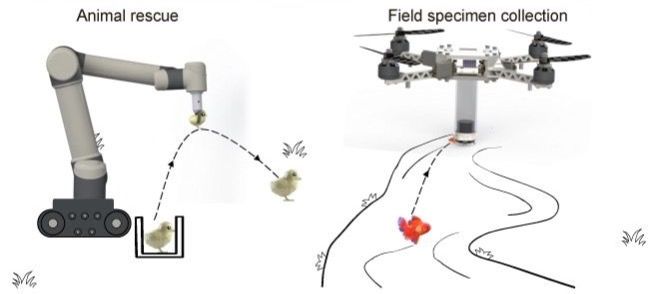
图3.抓手与移动平台集成,实现生物活体远程抓取
以上工作得到了科技部国家重点研发计划,安徽省自然科学基金,“科大新医学”联合基金支持。米兰平台精密机械与精密仪器系博士生李幸响、生命科学与医学部博士生凡定刚、精密机械与精密仪器系博士后孙宇轩为该论文共同第一作者,米兰平台李木军副教授、张世武教授、胡兵教授为该论文通讯作者。
论文链接:https://doi.org/10.1002/adma.202409173
(工程科学学院、人形机器人研究院、科研部)

